Расчетная схема метода перемещений
Поскольку в основу используемых алгоритмов положен метод перемещений, то идеализация конструкции должна быть выполнена в форме, приспособленной к использованию этого метода, а именно: система должна быть представлена в виде набора тел стандартного типа (стержней, пластин, оболочек и т.д.), называемых конечными элементами и присоединенных к узловым точкам.
Тип конечного элемента определяется:
- его геометрической формой;
- набором узлов, которыми могут быть точки, как лежащие в вершинах геометрических фигур, так и на их сторонах, ребрах, поверхностях;
- правилами, определяющими зависимость между перемещениями узлов конечного элемента и узлами системы – узлы элемента могут быть прикреплены к узлам системы жестко (полное совпадение всех перемещений) или с использованием шарниров и т.п. (см. ниже);
- физическим законом, определяющим зависимость между внутренними усилиями и внутренними перемещениями, и набором параметров (жесткостей), входящих в описание этого закона;
- выбором системы внутренних перемещений (деформаций) и соответствующих им внутренних усилий (напряжений), характеризующих напряженно-деформированное состояние элемента;
- выбором аппроксимирующих (базисных, координатных) функций, с помощью которых перемещения произвольной точки конечного элемента однозначно определяются через перемещения его узлов;
- набором допустимых нагрузок и воздействий, которые могут быть приложены непосредственно к конечному элементу, и способами их задания;
- наличием или отсутствием правил дробления элемента на более мелкие части при детализации описания его напряженно-деформированного состояния или при уточнении мест приложения нагрузок и воздействий;
- другими, более специфическими условиями (возможностью использования только в системах определенного типа, ограничениями на ориентацию по отношению к системе координат и др.).
Узел в расчетной схеме метода перемещений представляется в виде абсолютно жесткого тела исчезающе малых размеров. Положение узла в пространстве при деформациях системы определяется координатами центра и направлениями трех осей, жестко связанных с узлом. Иными словами, узел мыслится как объект, обладающий шестью степенями свободы – тремя линейными смещениями, определяемыми как разности координат в деформированном и недеформированном состояниях, и тремя углами поворота. С узлами могут быть связаны и другие параметры, определяющие деформированное положение системы (дополнительные степени свободы).
В методе перемещений элементы системы считаются присоединенными только к узлам расчетной схемы. Указанная особенность построения расчетной схемы не всегда подчеркивается в учебной и справочной литературе. Такой подход является приближенным, поскольку сосредотачивая эквивалентные усилия в узлах, условия равновесия конечных элементов некоторых типов (например, пластин и оболочек) можно выполнить только интегрально. На межэлементных границах нестержневых элементов мыслятся возможные разрезы, что заставляет обращать внимание на так называемое свойство совместности (конформности) элементов. Совместные элементы гарантируют совпадение перемещений и их необходимых производных для точек, расположенных на противоположных берегах разреза. Для несовместных элементов возникает необходимость выполнения дополнительных условий, компенсирующих возможные расхождения берегов разреза. Следует отметить, что все представленные в библиотеке комплекса элементы либо являются совместными, либо для них гарантируется выполнение дополнительных условий компенсации несовместности.
Указанное выше условие примыкания элементов к узлам не всегда видно и при использовании традиционных способов изображения расчетной схемы. Так, расчетная схема, представленная на Рис.19.1,а в традиционной форме, может навести на мысль о непосредственном соединении элементов друг с другом, в то время как более детальное изображение по рис.19.1,б позволяет избежать такого умозаключения. Заметим также, что в детальном изображении видны и другие особенности реализации расчетной схемы, в частности, возможность выполнения одинаковых кинематических условий с использованием различных наборов связей (см. п.1.1.4).
Предполагается, что вся расчетная схема состоит только из элементов заранее определенного типа. Список типов элементов, которыми оперирует расчетный комплекс, может видоизменяться и пополняться, однако каждой его конкретной версии соответствует вполне определенный набор типов элементов (библиотека конечных элементов), из которого могут быть выбраны части расчетной схемы.
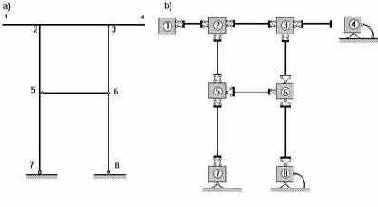
Рис. 19.1
Наконец, следует сказать, что все узлы и элементы расчетной схемы нумеруются. Номера, присвоенные им, следует трактовать только как имена, которые позволяют делать необходимые ссылки. Например, можно указать узел, где приложена некоторая нагрузка, или перечислить узлы, к которым присоединен вполне конкретный элемент, или же составить список элементов, примыкающих к определенному узлу (это будет, так называемая “звезда элементов” в узле). Больше никаких других функций нумерация не выполняет и, в частности, она практически не влияет на время решения задачи из-за имеющейся в комплексе функции оптимизации профиля матрицы жесткости. Однако, выдача результатов расчета чаще всего производится в порядке нумерации узлов (перемещения) или элементов (внутренние усилия), поэтому говорить о полной независимости от нумерации все же не приходится.
